目录
Global Planner
如果需要在导航包中使用move_base节点,我们需要一个Global Planner和一个local planner(一个老练的路径搜索器(pathfinder)外加一个琐细的运动算法(movement algorithm)可以找到一条路径)。
依赖于nav core::BaseGlobalPlanner接口的全局规划器有3个:
1.carrot_planner
2.navfn
3.global planner
一个优秀的全局路径搜索器: 不要等到最后一刻才发现问题。
carrot_planner
carrot_planner检查需要到达的目标是不是一个障碍物,如果是一个障碍物,它就将目标点替换成一个附近可接近的点。因此,这个模块其实并没有做任何全局规划的工作。在复杂的室内环境中,这个模块并不实用。
navfn
navfn使用Dijkstra算法找到最短路径。
global planner
global planner是navfn的升级版。它相对于navfn增加了更多的选项:
1)支持A*算法;
2)可以切换二次近似;
3)切换网格路径;
路径搜索中两种典型算法的对比(结果与速度):
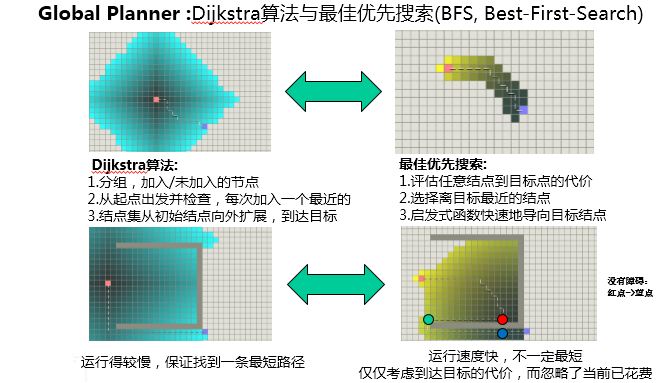
Global Planner路径搜索中最受欢迎的选择, A※算法
1.和Dijkstra一样,A※能用于搜索最短路径
2.和BFS一样,A※能用启发式函数引导它自己
因此A※算法能做到又快又好。
A*算法的代价函数:
\(f(\boldsymbol{n})=\boldsymbol{g}(\boldsymbol{n})+\boldsymbol{h}(\boldsymbol{n})\)
\(g(n)\)
:初始结点到任意结点n的代价
\(h(n)\)
:结点n到目标点的启发式评估代价
A*算法在有障碍和无障碍地图中的路径搜索结果:
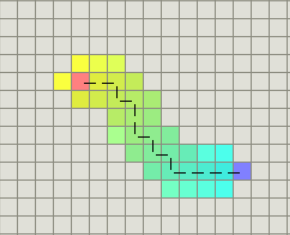
上图为无障碍时
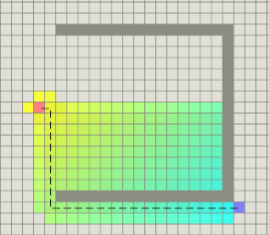
上图为有障碍时
\(h(n)=0\)
,只有
\(g(n)\)
起作用,Dijkstra算法
\(h(n)\)
比
\(g(n)\)
大很多,BFS(Best-First-Search)算法
\(h(n) \leq n\)
到目标点,保证能找到一条最短路径,运行慢(尝试的可能变多)
\(h(n) = n\)
到目标点,运行很快,非常完美,不太能发生
\(h(n) \geq n\)
到目标点,不能保证找到一条最短路径,运行得更快
Local Planner
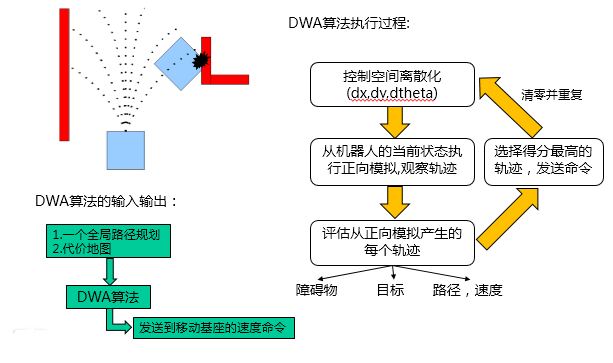
ROS中的local planner : DWA算法(dynamic window approach)
DWA算法的流程如下:
1.将机器人的控制空间离散化(dx,dy,dtheta)
2.对于每一个采样速度,从机器人的当前状态执行正向模拟,以预测如果在短时间段内采用采样速度将会发生什么
3.评估从正向模拟产生的每个轨迹使用包含诸如:障碍物接近度、目标接近度、全局路径接近度和速度等特征的度量,丢弃非法轨迹(与障碍物相撞的轨迹)
4.选择得分最高的轨迹,将相关联的速度发送给移动基站
5.清零然后重复以上过程
DWA算法的介绍:
Costmap Parameters
[参看文献1或文献4]
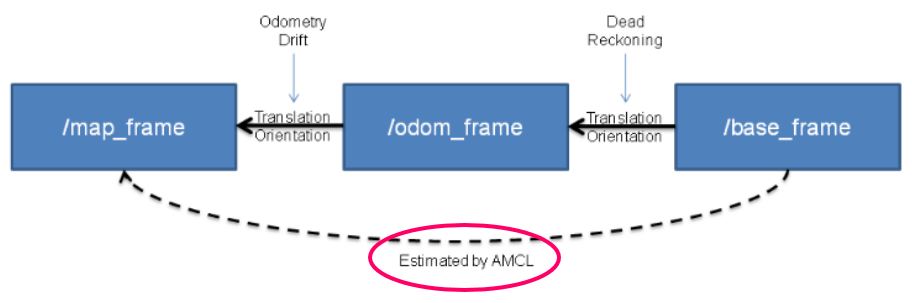
AMCL
AMCL是处理机器人定位的ROS包,是Navigation的一部分。
AMCL(Adaptive Monte Carlo Localization)即自适应蒙特卡罗定位。
AMCL cannot handle a laser that moves with respect to the base.
原理:粒子滤波器
1.每个样本存储表示机器人姿态的位置和方向数据。
2.粒子是随机抽样的。
3.当机器人移动时,粒子根据他们的状态记忆机器人的动作,进行重采样。
粒子滤波器的原理以及如何运用到AMCL
参看粒子滤波器介绍一文。
参考文献
1.ROS Navigation Tuning Guide.pdf
2.Amit’s A* Pages
3.Amit’s Game Programming Information
4.文献1的翻译
5.文献2和文献3关于A※算法的翻译-1
6.文献2和文献3关于A※算法的翻译-2